Object Tracking and Classification
Final project of the Perception for Autonomous Systems course
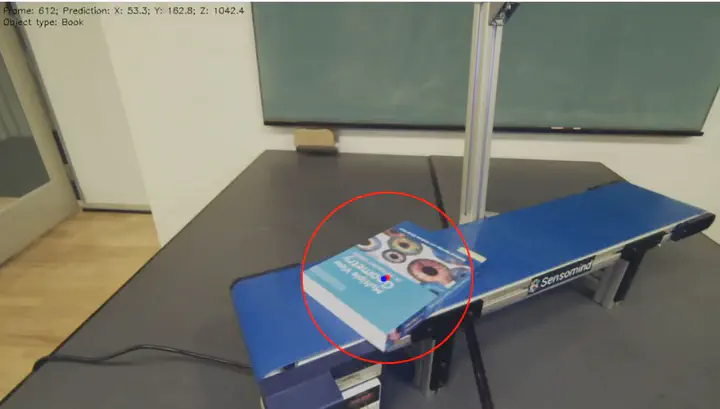 Results of the algorithm in the scenario without occlusions
Results of the algorithm in the scenario without occlusions
Activity goal
The objective of the final project is to detect, track, predict, and classify moving objects, whether they are occluded or unoccluded. In our scenario, we are given a stereo camera setup looking over a conveyor belt. Random objects are placed at one end of the conveyor belt at regular intervals. This simulates a general-purpose case where these objects need to have their attributes recognized in real-time. The main steps required to achieve our project objectives are:
- Camera Calibration and Rectification
- Object Detection and Tracking
- Object Classification
Alessandro Canevaro
MSc student
My research interests include Computer Vision, Autonomous Systems and Machine Learning.