Robot Operating System (ROS)
Final project of the Software Frameworks for Autonomous Systems course
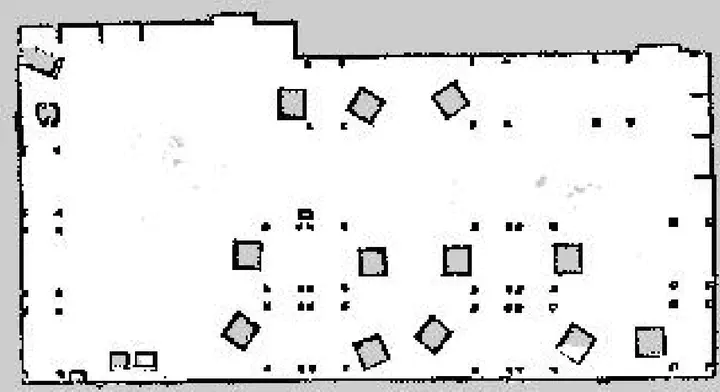 Map generated by the algorithm.
Map generated by the algorithm.
Activity goal
This project focuses on the development of software for a simulated robotic system, Turtlebot 3. This system should be capable of navigating a mostly predefined operational environment and to identify targets using information coming from QR codes. The environment is mostly predefined however the obstacles and targets, QR codes, can be spawned in pseudo random locations.
There will always be five QR codes, which spawn in the predefined operational area, however, the specific location of these QR codes will not be the same all the time. All QR codes contain four attributes. The attributes are the coordinates of the current QR target, the coordinates of the next QR target, and the ID of the QR code, which can be anywhere from 1 to 5. Lastly, a letter is also an attribute and these must be structured in the correct order in order to extract a message. Furthermore, the last QR code, i.e. the QR code number 5, has, as the next qr code coordinates, the coordinates of the first QR code.
Alessandro Canevaro
MSc student
My research interests include Computer Vision, Autonomous Systems and Machine Learning.