Control of the SCARA robot
Final project of the Robotics and Control course
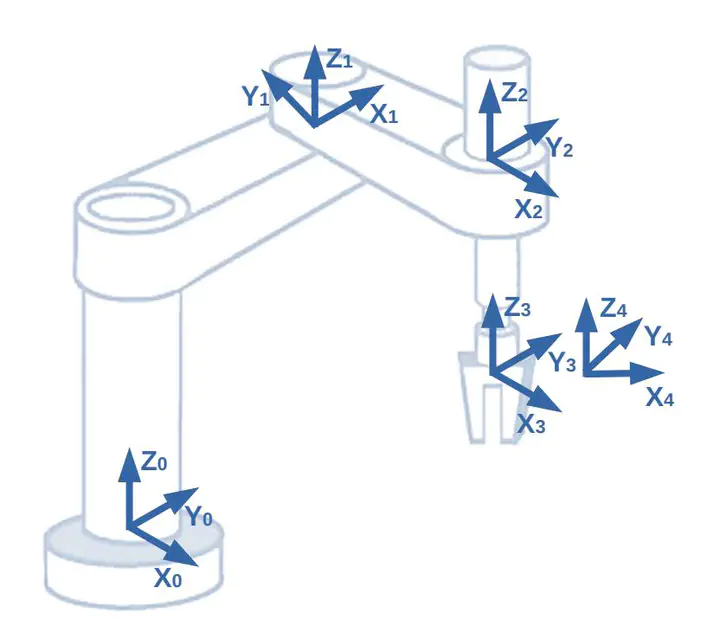 Representation of the SCARA robot in 3D.
Representation of the SCARA robot in 3D.
Activity goal
After having derived the equations of motion for the SCARA robot, 2 constrol solutions were designed, implemented and tested in MATLAB and simulink for trajectory tracking purposes. Specifically the first is a PD with gravity compensation controller, while the second one is a Feedback linearization controller.
Alessandro Canevaro
MSc student
My research interests include Computer Vision, Autonomous Systems and Machine Learning.